En ciencias de la
se denomina inteligencia artificial (IA) a las inteligencias no
naturales en agentes racionales no vivos. John McCarthy, acuñó el
término en 1956, la definió: "Es la ciencia e ingeniería de hacer
máquinas inteligentes, especialmente programas de cómputo inteligentes."
Para explicar la
anterior, entiéndase a un Agente inteligente que permite pensar,
evaluar y actuar conforme a ciertos principios de optimización y
consistencia, para satisfacer algún objetivo o finalidad. De acuerdo al
concepto previo, racionalidad es más general y por ello más adecuado que
inteligencia para definir la naturaleza del objetivo de esta .
Por lo tanto, y de manera más específica la inteligencia artificial
es la disciplina que se encarga de construir procesos que al ser
ejecutados sobre una arquitectura física producen acciones o resultados
que maximizan una medida de rendimiento determinada, basándose en la
secuencia de entradas percibidas y en el conocimiento almacenado en tal
arquitectura.
Existen distintos tipos de conocimiento y medios de representación
del conocimiento, el cual puede ser cargado en el agente por su
diseñador o puede ser aprendido por el mismo agente utilizando técnicas
de aprendizaje.
También existen distintos tipos de percepciones y acciones, pueden
ser obtenidas y producidas, respectivamente por sensores físicos y
sensores mecánicos en máquinas, pulsos eléctricos u ópticos en
computadoras, tanto como por entradas y salidas de bits de un software y
su entorno software.
Varios ejemplos se encuentran en el área de control de sistemas,
planificación automática, la habilidad de responder a diagnósticos y a
consultas de los consumidores, reconocimiento de escritura,
reconocimiento del habla y reconocimiento de patrones. Los sistemas de
IA actualmente son parte de la rutina en campos como economía, medicina,
ingeniería y la milicia, y se ha usado en gran variedad de aplicaciones
de software, juegos de estrategia como ajedrez de computador y otros
videojuegos.
APLICACIONES DE LA INTELIGENCIA ARTIFICIAL Son muchas las areas donde se puede utilizar la inteligencia artifical aunque unos estan en desarrollo. ROBOTICA Un escritor checo definió una palabra (robot), que vendria a cambiar la concepción de esclavo a máquina servicial.
La Robótica es la ciencia investigación, estudio y tecnología de los
robots. Se ocupa del diseño, manufactura y aplicaciones de los robots.
La robótica combina diversas disciplinas como son: la mecánica, la
electrónica, la informática, la inteligencia artificial y la ingeniería
de control. Otras áreas importantes en robótica son el álgebra, los
autómatas programables y las máquinas de estados.
El término robot se popularizó con el éxito de la obra RUR (Robots
Universales Rossum), escrita por Karel Capek en 1920. En la traducción
al inglés de dicha obra, la palabra checa robota, que significa trabajos
forzados, fue traducida al inglés como robot.
Historia de la robótica
La historia de la robótica ha estado unida a la construcción de
"artefactos", que trataban de materializar el deseo humano de crear
seres a su semejanza y que lo descargasen del trabajo. El ingeniero
español Leonardo Torres Quevedo (GAP) (que construyó el primer mando a
distancia para su automóvil mediante telegrafía sin hilo, el ajedrecista
automático, el primer transbordador aéreo y otros muchos ingenios)
acuñó el término "automática" en relación con la teoría de la
automatización de tareas tradicionalmente asociadas a los humanos.
Karel Čapek, un escritor checo, acuñó en 1921 el término "Robot" en
su obra dramática "Rossum's Universal Robots / R.U.R.", a partir de la
palabra checa robota, que significa servidumbre o trabajo forzado. El
término robótica es acuñado por Isaac Asimov, definiendo a la ciencia
que estudia a los robots. Asimov creó también las Tres Leyes de la
Robótica. En la ciencia ficción el hombre ha imaginado a los robots
visitando nuevos mundos, haciéndose con el poder, o simplemente
aliviando de las labores caseras.
DOMOTICA El
término domótica proviene de la unión de las palabras domus (que
significa casa en latín) y tica (de automática, palabra en griego, 'que
funciona por sí sola'). Se entiende por domótica al conjunto de sistemas
capaces de automatizar una vivienda, aportando servicios de gestión
energética, seguridad, bienestar y comunicación, y que pueden estar
integrados por medio de redes interiores y exteriores de comunicación,
cableadas o inalámbricas, y cuyo control goza de cierta ubicuidad, desde
dentro y fuera del hogar. Se podría definir como la integración de la
tecnología en el diseño inteligente de un recinto cerrado.
Las Aplicaciones
Los servicios que ofrece la domótica se pueden agrupar según cinco aspectos o ámbitos principales:
Ahorro energético
1. Ahorro energético: El ahorro energético no es algo tangible, sino
un concepto al que se puede llegar de muchas maneras. En muchos casos
no es necesario sustituir los aparatos o sistemas del hogar por otros
que consuman menos sino una gestión eficiente de los mismos.
1.
* Climatización: programación y zonificación.
* Gestión eléctrica:
o Racionalización de cargas eléctricas: desconexión
de equipos de uso no prioritario en función del consumo eléctrico en un
momento dado
o Gestión de tarifas, derivando el funcionamiento de algunos aparatos a horas de tarifa reducida
* Uso de energías renovables
Confort
2. Confort: Conlleva todas las actuaciones que se puedan llevar a
cabo que mejoren el confort en una vivienda. Dichas actuaciones pueden
ser de carácter tanto pasivo, como activo o mixtas.
1.
* Iluminación:
o Apagado general de todas las luces de la vivienda
o Automatización del apagado/ encendido en cada punto de luz.
o Regulación de la iluminación según el nivel de luminosidad ambiente
* Automatización de todos los distintos sistemas/
instalaciones / equipos dotándolos de control eficiente y de fácil
manejo
* Integración del portero al teléfono, o del videoportero al televisor
* Control vía Internet
* Gestión Multimedia y del ocio electrónicos
* Generación de macros y programas de forma sencilla para el usuario
Seguridad
3. Seguridad: Consiste en una red de seguridad encargada de proteger tanto los Bienes Patrimoniales y la seguridad personal.
1.
* Alarmas de intrusión (Antiintrusión): Se utilizan para
detectar o prevenir la presencia de personas extrañas en una vivienda o
edificio.
o Detección de un posible intruso (Detectores volumetricos o perimetrales)
o Cierre de persianas puntual y seguro
o Simulación de presencia
* Alarmas de detección de incendios, fugas de gas, escapes
de agua, concentración de monóxido en garajes cuando se usan vehículos
de combustión.
* Alerta médica. Teleasistencia.
* Acceso a Cámaras IP.
Comunicaciones
4. Comunicaciones: Son los sistemas o infraestructuras de comunicaciones que posee el hogar.
1.
* Ubicuidad en el control tanto externo como interno,
control remoto desde Internet, PC, mandos inalámbricos (p.ej. PDA con
WiFi), aparellaje eléctrico.
* Tele asistencia
* Tele mantenimiento
* Informes de consumo y costes
* Transmisión de alarmas.
* Intercomunicaciones.
INMOTICA Por
inmótica entendemos la incorporación al equipamiento de edificios de
uso terciario o industrial (oficinas, edificios corporativos, hoteleros,
empresariales y similares), de sistemas de gestión técnica automatizada
de las instalaciones, con el objetivo de reducir el consumo de energía,
aumentar el confort y la seguridad de los mismos.
Entenderemos que un edificio es "inteligente" si incorpora sistemas
de información en todo el edificio, ofreciendo servicios avanzados de la
actividad y de las telecomunicaciones. Con control automatizado,
monitorización, gestión y mantenimiento de los distintos subsistemas o
servicios del edificio, de forma óptima e integrada, local y
remotamente. Diseñados con suficiente flexibilidad como para que sea
sencilla y económicamente rentable la implantación de futuros sistemas.
Bajo este nuevo concepto se define la automatización integral de
inmuebles con alta tecnología. La centralización de los datos del
edificio o complejo , posibilita supervisar y controlar confortablemente
desde una PC, los estados de funcionamiento o alarmas de los sistemas
que componen la instalación, así como los principales parámetros de
medida. La Inmótica integra la domótica interna dentro de una estructura
en red.
Beneficios de la Inmótica Para el propietario del edificio, quien
puede ofrecer un edificio más atractivo mientras alcanza grandes
reducciones en los costos de energía y operación. Para los usuarios del
edificio, los cuales mejoran notablemente su confort y seguridad. Para
el personal de mantenimiento del edificio que, mediante la información
almacenada y el posterior estudio de tendencias, puede prevenir
desperfectos. Para el personal de seguridad, el cual ve facilitada y
complementada su tarea con el fin de hacerla mucho más eficiente.
Aplicaciones La Inmótica ofrece la posibilidad de monitorización del
funcionamiento general del edificio. Los ascensores, el balance
energético, el riego, la climatización e iluminación de las áreas
comunes, la sensorización de variables analógicas como temperatura y
humedad, control y alertas en función de parámetros determinados, el
sistema de accesos, sistemas de detección de incendios, etc. Del mismo
modo permite un mayor control de accesos y el seguimiento continuo de
quien haya ingresado al edificio. Se ha aplicado con éxito en edificios
residenciales, de oficinas, hoteles, hospitales, museos, centros
comerciales, centros de proceso de datos, geriátricos, barrios cerrados e
industrias. URBOTICA El
término Urbótica proviene de las palabras urbs (que significa ciudad en
latín) y tica (de automática, palabra que en griego significa 'que
funciona por sí sola'). Se entiende por urbótica al conjunto servicios e
instalaciones públicas que se encuentran automatizadas con el fin de
mejorar las gestión energética, la seguridad, el bienestar o confort y
las comunicaciones de todos los usuarios de estos servicios públicos. Se
podría definir como la integración de la tecnología en el diseño
inteligente de una ciudad.
Aplicaciones
Se pueden considerar sistemas Urbóticos los siguientes ejemplos:
* Sistemas de Telegestión y control del alumbrado público.
* Sistemas de videovigilancia ciudadana.
* Regulación semafórica.
* Puntos de información ciudadana automatizados.
* Recogida neumática de basuras.
REALIDAD VIRTUAL Realidad
virtual es un sistema tecnológico, basado en el empleo de ordenadores y
otros dispositivos, cuyo fin es producir una apariencia de realidad que
permita al usuario tener la sensación de estar presente en ella. Se
consigue mediante la generación por ordenador de un conjunto de imágenes
que son contempladas por el usuario a través de un casco provisto de un
visor especial. Algunos equipos se completan con trajes y guantes
equipados con sensores diseñados para simular la percepción de
diferentes estímulos, que intensifican la sensación de realidad. Su
aplicación, aunque centrada inicialmente en el terreno de los
videojuegos, se ha extendido a otros muchos campos, como la medicina o
las simulaciones de vuelo.
La virtualidad establece una nueva forma de relación entre el uso de
las coordenadas de espacio y de tiempo, supera las barreras
espaciotemporales y configura un entorno en el que la información y la
comunicación se nos muestran accesibles desde perspectivas hasta ahora
desconocidas al menos en cuanto a su volumen y posibilidades. La
realidad virtual permite la generación de entornos de interacción que
separen la necesidad de compartir el espacio-tiempo, facilitando en este
caso nuevos contextos de intercambio y comunicación.
Autores como Lévy, han señalado la existencia de diferentes niveles
de virtualidad en su relación con la dimensión
bidimensional/tridimensional y su relación con la realidad. Yendo desde
un continuo que comienza con una menor virtualidad de aquellos aspectos
que nos alejan de la realidad o que categorizamos a priori como
claramente imaginarios o ilusorios, aumentando con lo bidimensional,
hasta las posibilidades que ofrece la tridimensionalidad en su relación
de semejanza o analogía con lo real.
Uno de los avanzes mas importante de la inteligencia artificial ha sido la creacion del robot Asimo pero antes de introducirnos en el tema debemos saber que es un robot
Un robot es una entidad virtual o mecánica artificial. En la práctica, esto es por lo general un sistema electromecánico que, por su apariencia o sus movimientos, ofrece la sensación de tener un propósito propio. La palabra robot puede referirse tanto a mecanismos físicos como a sistemas virtuales de , aunque suele aludirse a los segundos con el término de bots. No hay un consenso sobre qué máquinas pueden consideradas robots, pero sí existe un acuerdo general entre los expertos y el público sobre que los robots tienden a hacer parte o todo lo que sigue: moverse, hacer funcionar un mecánico, sentir y manipular su entorno y mostrar un comportamiento inteligente, especialmente si ése comportamiento imita al de los humanos o a otros animales. Aunque las historias sobre ayudantes y acompañantes artificiales, así como los intentos de crearlos, tienen una larga historia, las máquinas totalmente autónomas no aparecieron hasta el siglo XX. El primer robot programable y dirigido de forma digital, el Unimate, fue instalado en 1961 para levantar piezas calientes de metal de una máquina de tinte y colocarlas. Por lo general, la gente reacciona de forma positiva ante los robots con los que se encuentra. Los robots domésticos para la limpieza y mantenimiento del hogar son cada vez más comunes en los hogares. No obstante, existe una cierta ansiedad sobre el impacto económico de la automatización y la amenaza del armamento robótico, una ansiedad que se ve reflejada en el retrato a menudo perverso y malvado de robots presentes en obras de la cultura popular. Comparados con sus colegas de ficción, los robots reales siguen siendo limitados.
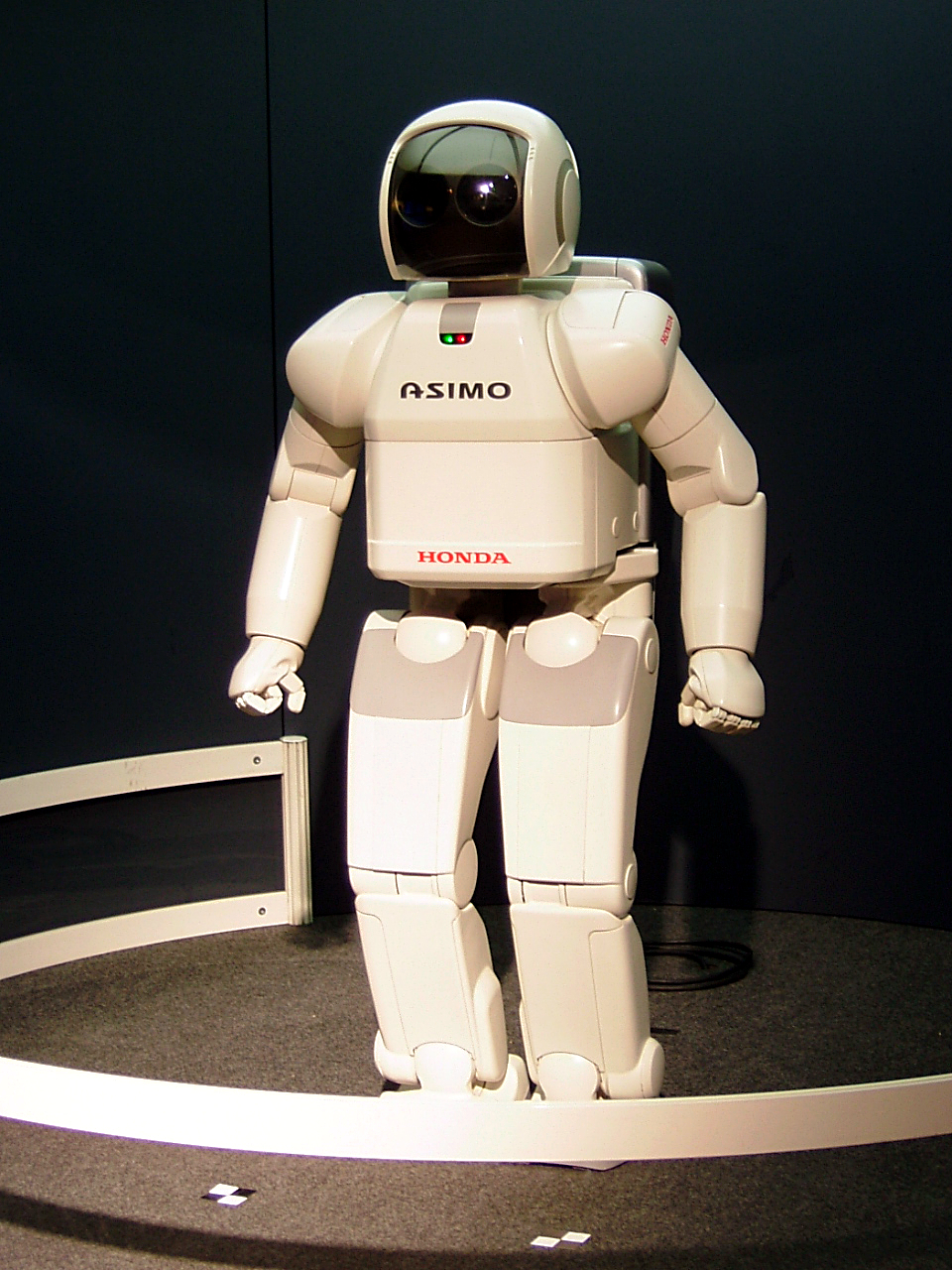
Sabiendo esto ya podremos adentrarnos en el tema de lo que o quien es ASIMO
Es un robot capaz de moverse, interactuar con los seres humanos y ayudarles es, sin duda, una de las mayores proezas tecnológicas del siglo XXI.
El compromiso a largo plazo de Honda en el desarrollo de robots humanoides se inició en los años 1980, creando su primer robot andador en 1986.
El objetivo de Honda es crear un robot humanoide capaz de interactuar con las personas y de ayudarles haciéndoles la vida más fácil y agradable. Aunque todavía estamos lejos de poder atribuir roles concretos a los robots humanoides, podrían utilizarse, por ejemplo, para ayudar e incrementar la autonomía de las personas con minusvalías y de las personas mayores. Evidentemente, todavía tienen que transcurrir muchos años hasta que se pueda cumplir este objetivo, pero algunas empresas de Japón ya utilizan los servicios de ASIMO para funciones promocionales como la recepción de visitantes. Para conseguir los movimientos de ASIMO, Honda ha estudiado y utilizado como modelo los movimientos coordinados y complejos del cuerpo humano. Las proporciones y la posición de las articulaciones de ASIMO se parecen a las de un ser humano y, en la mayoría de los aspectos, el robot realiza un conjunto de movimientos comparables a los nuestros. Gracias a un nuevo sistema de movilidad avanzado que ha implantado Honda, ASIMO no sólo puede avanzar y retroceder, sino que también se desplaza lateralmente, sube y baja escaleras y se da la vuelta mientras anda. En este aspecto, ASIMO es el robot que mejor imita los movimientos de avance naturales de los seres humanos. La combinación de un hardware muy receptivo con la nueva tecnología "Posture Control" permite que ASIMO flexione el torso para mantener el equilibrio y evitar los patinazos y giros en el aire, que suelen estar vinculados a los movimientos rápidos.



 Comunicaciones
Comunicaciones



No hay comentarios:
Publicar un comentario